Mackerel + Raspberry Pi で 職場環境をモニタリング
皆さんMackerelをご存知ですか?
Mackerel とは はてな社が提供しているサーバー監視のサービスで、
サーバーにエージェントと言われるモジュールを設置するだけで、サーバーの状況がブラウザからグラフィカルに確認できるサービスです。
また、監視ルールを設定しておくことにより、サーバーが特定の状態(CPU使用率90%以上など)になった場合アラートを通知したり
無料プランでも一部制限はありますが、サーバー5台まで監視可能など、お手軽、便利、太っ腹なサービスです。
今回は、そんな本来はサーバー監視のサービスであるMackerelを本来の用途以外に使ってみようと思います。
突然ですが、夏ですね
だんだん気候も夏めいて来た今日このごろ、やはり気になるのはオフィスの環境。
健康を害するような環境で仕事をしないためにも、暑さで仕事の効率が落ちないためにも職場環境には気を使いたいところです。
というわけで、今回は職場(でなくてもいいですが)の温度と湿度を計測したいと思います。
温度・湿度を測定する
では、実際に監視システムを構築していきたいと思います。
今回使うもの
- Raspberry pi 2 Type B
- 温湿度センサー
- 今回はAM2320 http://akizukidenshi.com/catalog/g/gM-08663/ を使用しました。
- Raspberry pi と 温度センサー接続用のブレッドボードやジャンパ線
- 温度センサーとRaspberry Pi をつなぐための線を必要な分用意します。
- 以前に使用したズゴック(オプション)
ハードウェアの準備
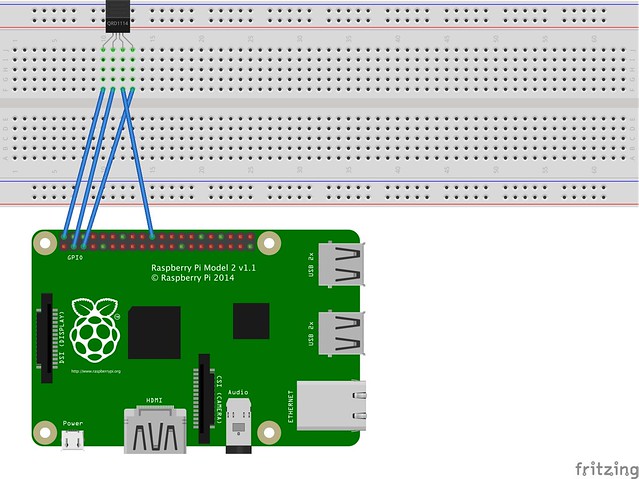
Raspberry Pi と AM2320 を接続する
この実体配線図のようにAM2320をRaspberry Pi と接続します。
AM2320は型番のシルク印刷を表に見た場合、
左から
- VDD <-> Pin #2 5V
- SDA <-> Pin #3 SDA
- GND <-> Pin #20 等 GND
- SCL <-> Pin #5 SCL
と接続します。
ソフトウエアの準備
Raspberry Pi で I2C を使えるようにする
今回使用する AM2320 という温湿度計モジュールは I2C インターフェース経由でデータを取得します。
RaspberryPIは初期状態ではI2Cが有効になっていないため、
こちらのページ https://blog.ymyzk.com/2015/02/enable-raspberry-pi-i2c/ を参考にし、I2Cを有効にします。
AM2320からデータを取得するプログラムを用意する
こちらのコード https://github.com/takagi/am2321 をベースにし、出力をMackerelに対応させたコードがこちらです。
これをRaspberryPI上でコンパイルし、パスの通った場所に配置します。
|
|
Mackerelとの連携
Mackerelに登録してオーガニゼーションを作成する
http://help-ja.mackerel.io/entry/getting-started
の手順にそって、オーガニゼーションを作成します。
maeckrel-agent をインストールする
パッケージをダウンロードし、インストールします。
|
|
ARM 版バイナリに実行ファイルを置き換える
通常ならば、パッケージをインストールすれば完了ですが、
RasperryPiはもともとMackerelが想定しているCPUとアーキテクチャが違うためかそのままではうまく起動しません。
そのため、RaspberryPiのCPUにあったアーキテクチャのMackerelの実行ファイルで上書きします。
|
|
maeckrel-agentの設定
インストールが完了したので、設定をしていきます。
設定ファイルに apiKeyとカスタムメトリクスの設定を追加します。
/etc/mackerel-agent/mackerel-agent.conf に オーガニゼーションの画面に表示されているAPIKEYと
以下のカスタムメトリクスの設定を追加してください。
|
|
mackerel-agent 起動
以上で設定がひと通り完了しましたので、エージェントを起動します。
|
|
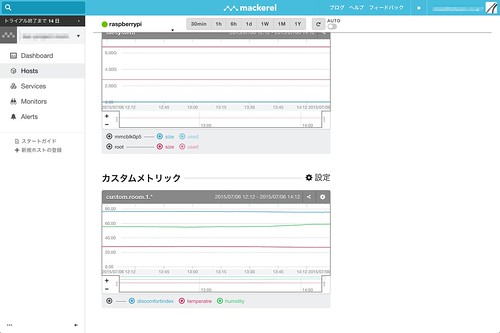
これで、先ほど作成したオーガニゼーションに自動的にホストが追加され、
mackerelのデフォルトの監視項目と、温湿度計のデータが記録されていくようになります。
アラートの設定
無事に温度と湿度の記録が始まりました。
しかしながらこれだけでは、職場が危機な状況になっても気づくことが出来ません。
ということで、職場の労働環境を監視する尺度として、不快指数を使って職場環境をモニタリングしたいと思います。
実は先程のMackerelカスタムメトリクス取得プログラムには、温度、湿度以外に不快指数も取得できるようにしてあります。
なので、手順通りに設定した場合は、すでにカスタムメトリクス上に不快指数が記録されていると思います。
wikipediaによると、日本人は不快指数が77を超えた辺りから一部の方々が不快を覚え始め、80を超えるとみんなが不快感を感じるそうなので、
この値を超えた場合に通知が来るように設定したいと思います。
- Macerel管理画面から Monitor メニューをクリックし、監視ルールを追加ボタンをクリックします。

- ポップアップしたウィンドウに監視条件を入力し作成ボタンをクリックします。
今回は不快指数(custom.room.1.discomfortindex)を選択し、77でWarning、80でCriticalとなるように設定します。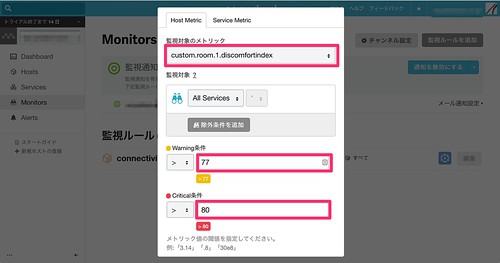
- 作成した関し条件が一覧に表示されていれば成功です。
これで不快指数がしきい値を超えるた際にメール通知がされるようになりました。また、チャットなどメール以外の通知方法も用意されています。(私はHipChatにも通知しています。)
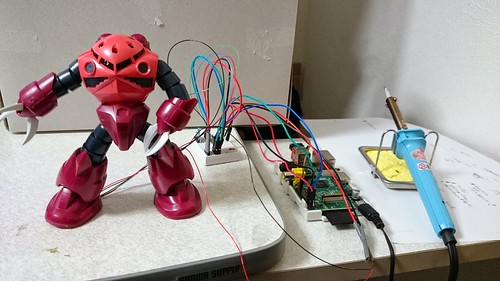
ズゴックと連携する
以前作成した、ズゴックXFDですが、
チームのみんながちゃんとテストが通ることを確認してからソースコードをPushするため、ほぼ活躍する機会がありません。
このままだと ただ職場にガンプラをおいている人になってしまう ので、
ズゴックの存在意義を上げるべく温度計を連携させたいと思います。
温度計の実装
- ドリルで大まかな穴を開けた後、ニッパーで穴をつなぎ

- カッターで凹凸を整えます

- 温度計を開けた穴にはめ込み、配線を足経由で踵から外部に引き出せば完成です。

- 組み立てるとこんなかんじになります。

結果
晴れてズゴックに温度計が付き、職場の状況をモニタリングすることが可能になりました。
これで、自分の居室の不快指数を計測し放題です。
計測したところで、特に快適になったりはしないのは残念ですが、
計測データを元に現場のリーダーに職場環境のカイゼンをお願いする材料くらいにはなるはずです。
ただ、残念ながら、温度計を付けてもズゴック見た目に変化がないので、
相変わらず傍から見るとガンダム好きな人にしか見えないという点は今後の課題とします。
みなさんもMackerelと様々なセンサーを組み合わせて遊んでみるのはいかがでしょうか?
参考URL
Raspberry Pi の I2C を有効化する方法 (2015年版)
https://blog.ymyzk.com/2015/02/enable-raspberry-pi-i2c/
Raspberry Pi で湿度センサ AM2321 を使う
http://technology-memo.seesaa.net/article/404719464.html
Mackerelについて
http://qiita.com/ariarijp/items/838628e121b051524309
不快指数
https://ja.wikipedia.org/wiki/%E4%B8%8D%E5%BF%AB%E6%8C%87%E6%95%B0